This switched network Lei Feng, the original title: Unlike Compass, GPS, parses indoor positioning behind the micro inertial navigation technology, the authors: large lattice GZ, article reprint authorized.
When it comes to positioning and navigation, we first think of GPS, and China has also launched its own satellite positioning system Beidou satellite positioning system. However, satellite positioning can only be used in outdoor environments. Once in the room, satellite navigation cannot be used because the navigation signal is attenuated too quickly.
So are there any "just-needed" indoor positioning? The answer is yes. Today we don’t talk about the very lively consumer-level market applications. We talked about the application of indoor positioning technology in some special but very important scenarios—fire rescue, anti-terrorism, sudden rescue, and disaster relief.
Special needs for indoor positioning technology for emergency tasks such as firefighting and rescue

Imagine this scenario: In the scene of the fire, firemen rushed into the building where the fire was burning. They tried to search for the survivors. The fire was getting fiercer, the smoke was full, the firemen lost their way to the road, the oxygen was not enough, and eventually they lost their lives...
If the firefighter's position can be accurately located, the commander at the rear can grasp the real-time movement of the firefighters who enter the fire scene to provide accurate command to the on-site personnel through the communication equipment, to avoid the firefighters getting lost in the fire, and to minimize the casualties. This is also a merit for indoor positioning technology.
At present, mainstream indoor positioning technologies in the industry generally require external facilities or prior databases such as UWB, WiFi, Bluetooth, and geomagnetism, etc. Emergency tasks such as fire and rescue are usually too late or the environment does not allow placement of externally located equipment such as base stations or beacons. Therefore, there is no one. This can meet the requirements of autonomous positioning under emergency tasks. Therefore, the use of inertial navigation positioning technology that does not rely on any external equipment or prior database is a more reliable means at present. Inertial navigation positioning technology is a completely autonomous navigation technology. Unlike ordinary positioning technology, it does not rely on navigation satellites, wireless base stations, electronic tags, and any auxiliary equipment and prior database.
For the indoor positioning requirements of emergency tasks, whether or not the positioning products can achieve actual combat results should be evaluated or actually tested from the following aspects:
1, whether it can adapt to a variety of gait, a typical gait, small steps, trotting, side shift, back, downstairs and so on;
2. Walk more than 50 meters along the long straight line, turn to more than 5 circles (radius of 2 meters or more) at the end, and then walk along the original straight line to evaluate the offset. The offset is within 1% of the product is excellent ( There is a fixed angle and position drift that cannot be eliminated in inertial navigation and can only be reduced as much as possible;
3. Repeatedly go up and down the stairs to assess the high degree of accuracy, especially the floor judgment, to see if there will be floor errors, small errors can be accepted, but the floor error will delay the rescue and even cause fatal mistakes;
4. Field tests are conducted in buildings. Magnetic field is an important information for inertial navigation indoor positioning and can be used to control inertial navigation drift. However, it is also vulnerable to external influences, especially if buildings are relatively compact, there are many metal structures, and there is a large-scale display environment, the magnetic field anti-interference characteristics of the positioning products should be evaluated;
5, conditional ignition test can be carried out, the fire will cause dramatic changes in temperature and air flow, if the barometer data fusion is not handled well, there will be a large degree of deviation, the simple test method is to adjust the indoor and outdoor temperature difference through the air conditioning, through the indoor External test positioning stability;
6. Whether the use is convenient and whether external base station assistance is needed can be evaluated. In emergency response tasks such as fire rescue, it is not possible to rely on any external base station. Our GNW-FOEM can maintain 45 without external base station assistance. Accuracy is available in about minutes, which is superior in similar products;
7. The pros and cons of map fusion algorithms, the use of maps, and the use of maps for evaluation. Our iNav intelligent positioning engine provides map input interfaces. In the presence of indoor map information, we can maintain high accuracy without drifting for a long time. The typical test has been in the mall and the accuracy is stable at 2 meters in one hour;
8. The choice of data communication methods can be broadly divided into two types. One is the use of carrier network transmission (using the coverage redundancy of the underlying network and its robust communication mechanism), and the other is the use of a dedicated network, but currently There is no special communication network that can be deployed quickly and easily and can be worn and can cover fire and rescue (usually it can reach the performance level when reaching the basement level). If the product can be compatible with the operator network and the dedicated network, it is already a kind of Better way.
A more feasible product configuration scheme is one master control + 4-8 single soldier configuration, as shown in the figure:
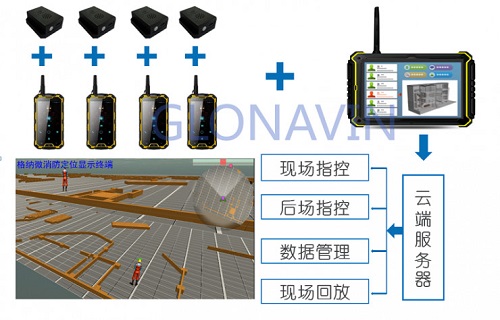
Figure 1 Scheme diagram of emergency mission site command system
Each individual soldier is equipped with a positioning module (foot) and a handheld terminal. After the module acquires the movement data of the personnel, it is transmitted to the handheld terminal through Bluetooth communication. The handheld terminal transmits the data to the command center through the far-field communication device. The system can be integrated into an indoor map with a horizontal accuracy of 0.3%, enabling accurate floor recognition. Multiple command points at the scene and in the backcourt can be displayed synchronously, which is conducive to the firefighters' on-site command and dispatch, reducing the number of casualties on site, enabling the task to be played back afterwards, and teaching and experience summing up.
Micro inertial navigation indoor positioning technology has irreplaceable advantages in emergency tasks
In the case of emergency missions, mainstream indoor positioning technologies in the industry generally require external facilities, and most of them cannot meet the requirements for autonomous positioning in emergency situations. In this case, the first thought is the inertial navigation indoor positioning technology. Based on this, a number of companies have also emerged in the market to do INS positioning.
The overseas representative companies are Honeywell and SEER Technology. The positioning accuracy of the products is basically 2%-5%, which means that the user walks 1km and the position error is 20 meters. This is unable to meet the actual application requirements and will delay the escape and rescue. With emergency tasks that are closely related to positional accuracy, the entire product does not meet the actual technical specifications. Therefore, this part of the product has also failed to open the market due to its immature technology.
There are also several companies in the country, such as Wei Meisen, and the author's Ganna Micro Technology. Among them, our product positioning accuracy has reached 0.3%, equivalent to less than 3 meters error in walking 1 km, can adapt to <15km/h walk, trot, side shift, back and other arbitrary walking posture, can basically meet the actual application requirements .
Most people still have doubts about 0.3% accuracy. In fact, the product uses an ordinary low-cost MEMS solution, which is the G-sensor in a smart phone, and does not rely on any auxiliary information such as base stations. This low-cost MEMS device usually has a very high directional drift error (≥100°/h) and acceleration error. If the ordinary dead reckoning algorithm is only used, the acceleration and integration errors caused by the acceleration integral will be as high as 10 %the above.
Micro inertial navigation indoor positioning technology is currently developing rapidly, mainly for emergency rescue or military use, and is roughly divided into two types:
(1) Wearing the inertial navigation module at the waist, using the traditional PDR dead reckoning scheme;
(2) The INS module that is worn on the foot is developed based on the foot motion model with high precision;
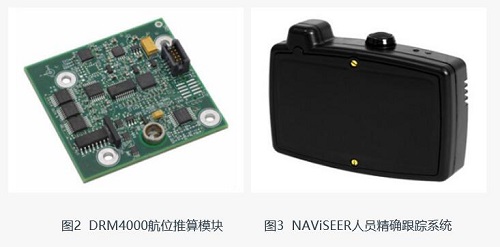
The scheme on the waist is more practical, but it will produce a significant accumulation of errors for gait such as side shift, turning, and standing still. At present, the experimental result of our lumbar inertial navigation product is 2% accuracy, and the error of walking 100 meters is up to 2 meters. The well-known Honeywell DRM4000 (Figure 2) and SEER Technology's NAViSEER (Figure 3) are all adopting this type of technical solution. The accuracy of the measurement is approximately 2% to 5%. The lumbar inertial navigation positioning module cannot adapt to a special gait, and its practical application is limited. It is hoped that more excellent products and technologies will emerge in the late stage.
The foot scheme has high precision and is relatively stable. If the accuracy can be stabilized within 0.3%, it can basically meet the needs of emergency tasks. Fire, anti-terrorism, and rescue missions do not take long distances within the building, and the accumulated 1km error accumulates 3m. Users are basically acceptable.
"Micro inertial +" fusion positioning solution
The pure inertial navigation is located in the indoor small scene. After a long walk, the angle and position drift are not obvious, so no other auxiliary positioning means is used in many usage scenarios. However, this pure inertial navigation positioning product still has two weaknesses:
First, the output is a relative trajectory, and the trajectories of multiple personnel need to be unified into one coordinate system. At present, more methods are used. All emergency task personnel go through the same long straight line at departure, and rotate the trajectory to a unified coordinate at the application layer. . The second approach is probably to deploy two mats (at least 10 meters apart). All players step on two mats in turn, and they can use the background to automatically rotate multiple players to one coordinate.
Secondly, with respect to the accuracy of purely INS positioning, the 0.3% accuracy in the industry is currently relatively high, but in the case of long-distance large scenes, due to the inherent drift rate of inertial navigation, there will still be a large cumulative error (Figure 2). 4). External information is required for calibration.
For these two major issues, here I share our two solutions, to give you a reference:
(1) Map assisted micro inertial navigation positioning;
(2) Using an external Bluetooth base station to assist micro inertial navigation positioning.
If it is possible to obtain information of building interior maps of emergency mission scenarios, and use map matching technology, the particle filter automatic learning path algorithm based on map information is used to calibrate the residual errors in the inertial navigation positioning and calibrate a plurality of them to achieve long-term stable positioning. Further reduce the number of auxiliary positioning base stations and reduce the complexity of the positioning system.
With external Bluetooth base station-assisted positioning, we are currently based on micro inertial positioning, which is calibrated using the Bluetooth signals acquired by the base station. The targeted personnel acquires their own inertial navigation data and inter-base station acquired information in the building. A stable and high-precision positioning result, while achieving multi-person trajectory calibration, the actual test results will be better. One issue that needs to be considered here is the flexibility and speed of assisting base station deployment.
Bluetooth can also be used for indoor positioning, but the signal transmission range is relatively small, and is easily subject to the environment including the human body to block and interfere with, positioning accuracy is not high, generally about 3 meters; but Bluetooth devices are lightweight, low cost, more convenient layout, which It is a big advantage for emergency missions. Therefore, high-precision inertial navigation positioning is mainly used to facilitate the temporary deployment of Bluetooth beacons, which is expected to solve the problem of rapid deployment of indoor positioning sites in emergency mission situations.
The following is an external field experiment using a high-precision micro inertial positioning module combined with Bluetooth beacons, and data fusion through the iNav intelligent positioning engine developed independently.
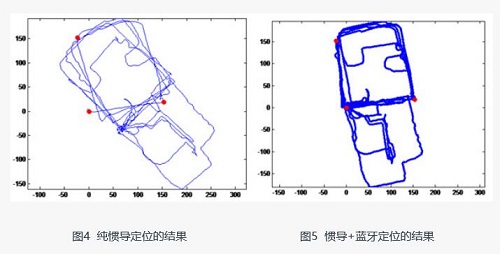
In a large department store, only a total of three Bluetooth beacons were deployed within an area of ​​approximately 200 meters by 300 meters, and the location indicated by red in FIG. 5 is the location of the beacon. About 1 and a half hours of free walking, a total of about 6km, without any map information, can achieve long-term high-precision positioning, the largest positioning error of 3.6 meters, more than 90% of the positioning error within 2 meters . The positioning accuracy of INS is also drifting, especially in this large scene, the angular deviation of 1 to 2° can cause displacement deviation of 6 to 8 meters. The data of Bluetooth beacon and inertial navigation are optimized through iNav engine fusion. After that, the multi-person relative trajectory is rapidly unified to the first person's coordinate system, and robust high-precision positioning is achieved.
In fact, the reason why we chose to propose the “Micro Inertia+Bluetooth†indoor positioning solution is very simple – it is easy to deploy, and the drift of inertial alignment or inertial navigation automatically realizes the alignment of multiple people’s trajectory direction without any map information fusion. Maintaining a stable and acceptable accuracy range for a long time is very suitable for emergency mission indoor scenes.
In actual use, the first emergency personnel entering the room can randomly deploy 3 to 4 bluetooths at some key indoor locations (gates, stairs corners, etc.) to complete the deployment. The subsequent positioning results of the team members can rely on these. Bluetooth tabs work.
There are many types of indoor positioning technology, but it is impossible to completely solve the actual problem by a single technology, and it is also impossible to meet the requirements of low cost, high accuracy, and wide coverage at the same time. In the future for a long time, micro inertial positioning will be the core technology in the emergency task indoor positioning solution.
The author is Lattice GZ, Director of Technology of Gnein Microelectronics, Master of Xi'an Electronic Technology University, Major in Control Theory and Control Engineering. As an important participant in national inertial navigation products, the research results have been successfully applied to the military industry. He is currently responsible for the team's technical line and product technology research and development, and he is involved in space positioning inertial navigation, ultra-wideband, laser, and visual SLAM. In this article, the author combines his work experience to talk about the micro inertial navigation positioning program, and why the choice of the program lies behind.
Lei Feng network original article, without permission to prohibit reprint. Reproduced, please contact the authorization according to the original .
Customizing up to 12" inner diameter, with the features of high discharge efficiency and large flow, Letone Suction Discharge hose is widely using in the construction and agriculture industries.we can providecustomers with the size of 1 inch~ 16 inches, the application of the hose is mainly usedfor conveying concrete, mud,sand,slag and other media.
Suction Discharge Hose,Suction Hose,Rubber Suction Hose,Sand Rubber Suction Hose
Luohe Letone Hydraulic Technology Co., Ltd , https://www.litonghoses.com